Camera Coordinate System and Conventions¶
Camera¶
The pose of a camera, conceptually, consists of two things:
Which direction does it face in, i.e. its local coordinate axes
Where is it, i.e. the position of the camera origin
Local coordinate system of camera¶
These online docs say that, from the POV of a camera (a.k.a. a Shot
object):
The z-axis points forward
The y-axis points down
The x-axis points to the right
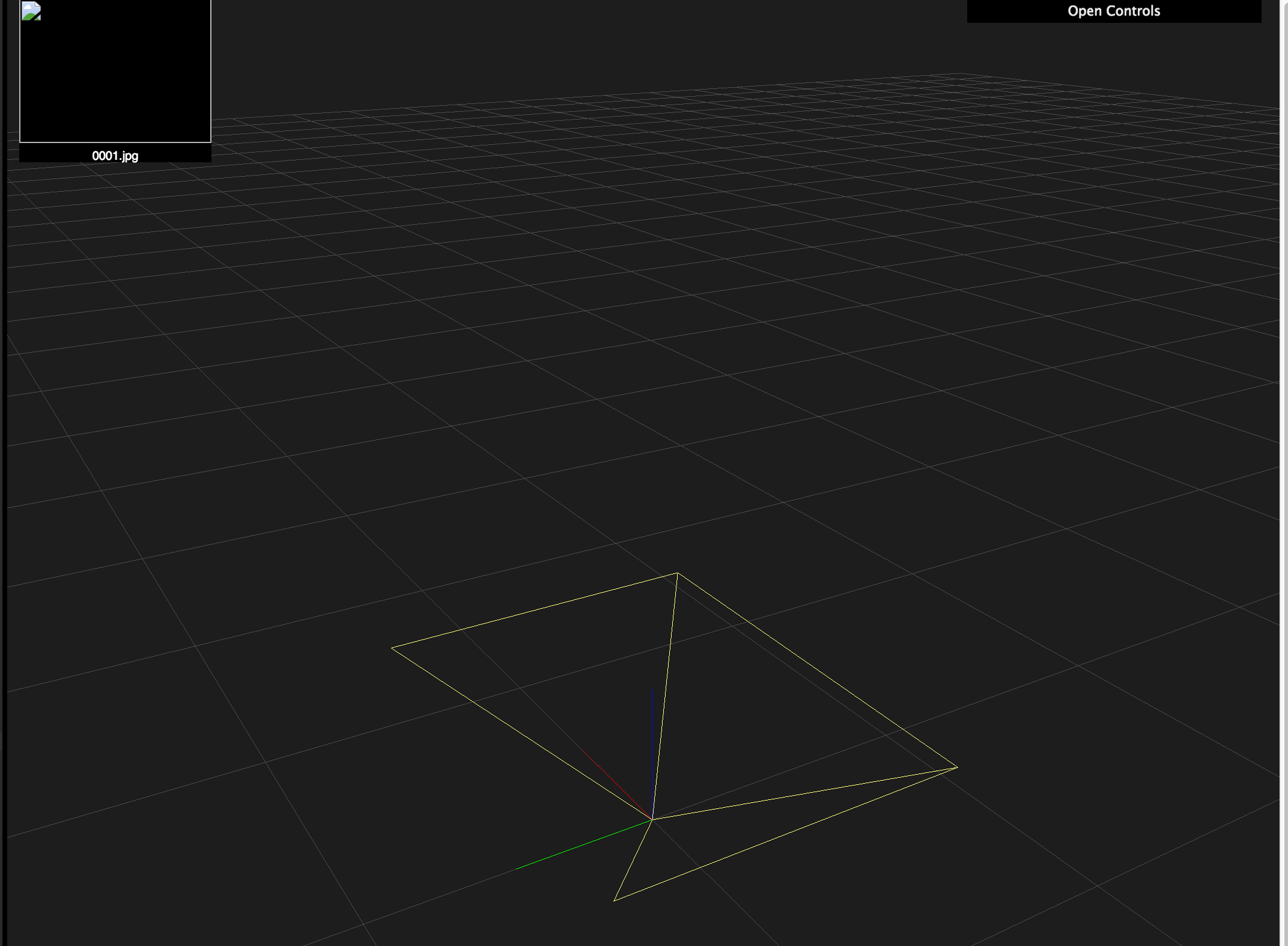
In the 3D reconstruction viewer, the axes go Red, Green, Blue: x, y, z.
The OpenSfM Pose class contains a rotation field, representing
the local coordinate system as an axis-angle vector.
The direction of this 3D vector represents the axis around which to rotate.
The length of this vector is the angle to rotate around said axis. It is in radians.
Camera position¶
To get and/or set the actual the actual camera position in world coordinate, one has to use get_origin()/set_origin().